
For my senior capstone, I had the opportunity to work on a project sponsored by the Jet Propulsion Laboratory. The project involved designing, manufacturing, and testing a Mars Hexacopter Chassis intended for launch on a Falcon 9 rocket and guided descent from a jetpack-equipped capsule to the Martian surface.
Motivation
Since the Mars 2020 Perseverance rover’s successful landing, a new era of controlled flight on Mars has begun, advancing planetary research. NASA’s Ingenuity Mars Helicopter, launched in July 2020, was the first to demonstrate aerial capabilities on another planet, completing 60 flights despite being designed for just five. Ingenuity’s chassis was built to withstand launch and landing loads, extreme thermal environments, and the thin Martian atmosphere, while also housing critical components like batteries, sensors, and heaters. Its success proved that flight on Mars is viable, offering insights that will guide the development of future aerial missions.
The Mars Science Helicopter (MSH) aims to expand on Ingenuity's achievements with greater scale and capability. Unlike Ingenuity’s two two-bladed propellers, MSH will feature six six-bladed propellers to handle heavier payloads and traverse more challenging Martian terrain. Additionally, while Ingenuity took off from a stationary position, MSH will be deployed mid-air during atmospheric entry using a jetpack system, targeting difficult areas like Valles Marineris.
Given the significant differences in design and mission objectives, MSH faces unique challenges. The project seeks to develop a new chassis capable of supporting more demanding payloads and flight dynamics, addressing the limitations of ground-based rovers and advancing the potential for aerial exploration on Mars.

Valles Marineris (The Grand Canyon of Mars)
Fuselage Design
Hexagonal structure made of carbon fiber composite for optimized mass and stiffness.
Accommodates sensors, electronics, and solar cells while maintaining structural stability.
Optimized to withstand Falcon 9 launch loads while minimizing weight (44 kg < 50 kg limit)
Tab and slot construction allows precise positioning of internal structural members.
Chassis frame is bonded with aerospace-grade epoxy.
Stows within the aeroshell capsule geometry.






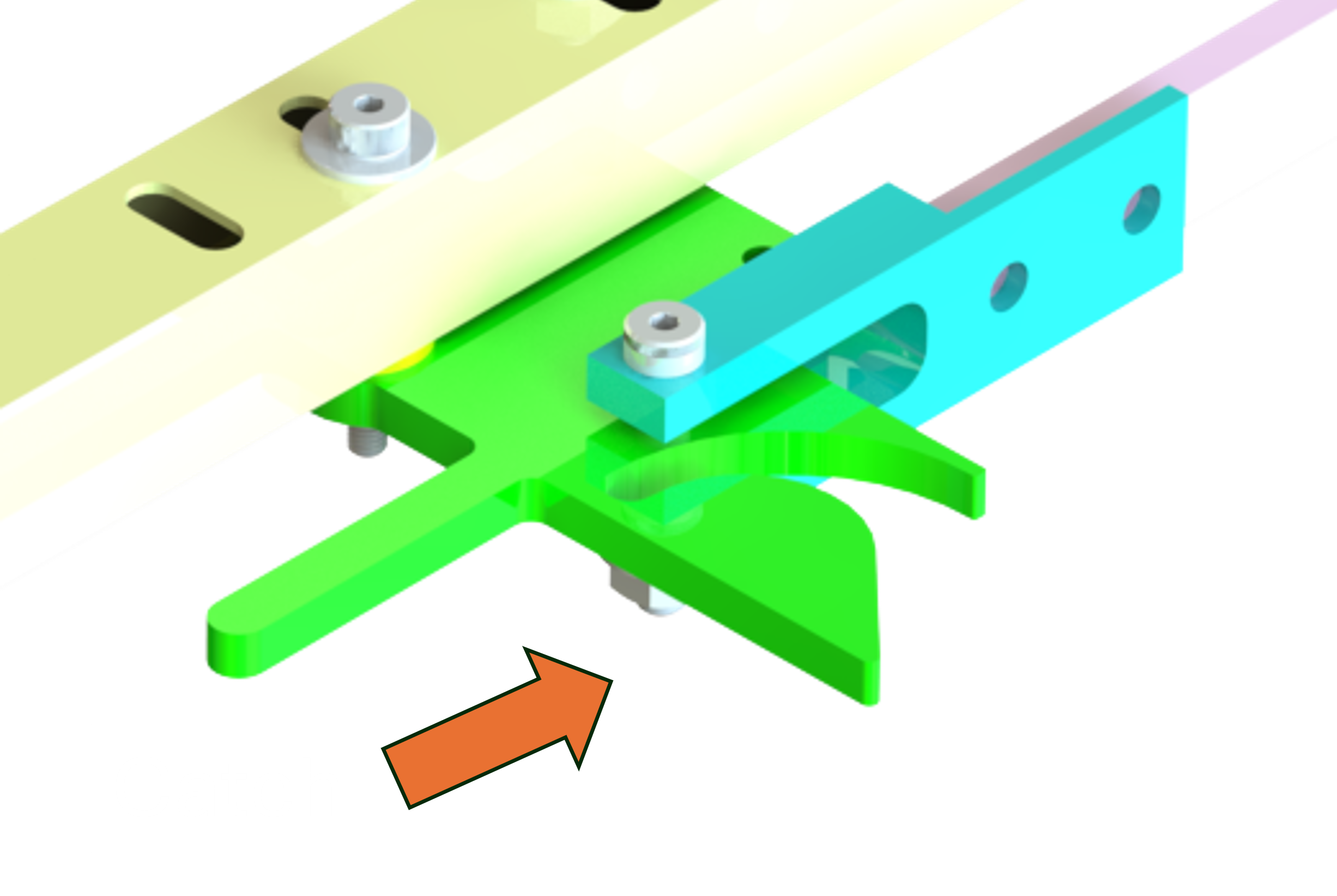
Arm Deployment Design
Utilizes a constant torque spring for controlled deployment over traditional torsional springs.
Utilizes dual spools with custom-sized bushings for smooth winding and unwinding during deployment.
Features a reliable catch component that ensures the arm fully stops and locks upon deployment.
Designed for Manufacturability using both CNC and manual mills and lathes.
Designed for easy swapping of constant torque springs to meet specific requirements.
Modular design enables off-chassis deployment testing for greater flexibility.








Rotor Deployment Design
Utilizes a variable compression spring to adjust the locking pin force to lock the rotor in place.
Designed to be machined using a CNC mill machine.
Designed to lock into place once it has rotated 60 degrees without slipping.
Modular design enables off-chassis testing with various motors and drill chucks
Capable of holding six rotor blades and stowing them within the chassis frame.








Manufacturing
During this project, I served as the manufacturing engineer while also contributing to the design of the chassis framework and deployment mechanisms. I manually machined components using self-drafted reference drawings, working with mills and lathes, as shown in the slide deck to the right.
I accumulated over 150 hours in the machine shop, becoming proficient with mills, lathes, and other equipment. Our total budget was $4,000, with most funds allocated to stock material for machining, while additional costs covered out-of-house processes like water-jetting the chassis frame.



























Vibration Testing
To validate the optimized chassis framework based on Femap simulations, we conducted vibration testing to simulate Falcon 9 launch loads.
Blue Canyon Technologies provided access to a vibration table, where we performed random vibration, sine sweeps, and sine bursts along the XY and Z axes, all in accordance with NASA GEVS requirements.
Our chassis successfully withstood all loads, and the Femap simulations closely matched the actual vibration test data.














This project was a significant success for our team, and it stands out as one of the most immersive and hands-on projects I’ve had the opportunity to work on. It allowed me to apply the full range of skills I’ve developed throughout my academic career, from design and manufacturing to testing and validation.
I look forward to building on the knowledge and skills gained from this capstone, contributing to more complex projects, and pushing the boundaries of what’s possible with engineering.
